Getting Started with FoBE Breakout L76K
Introduction
The FoBE Breakout L76K integrates the Quectel L76K multi-constellation GNSS receiver, supporting GPS, BeiDou, GLONASS, Galileo, and QZSS satellite systems. The module provides fast and accurate positioning with AGNSS support, featuring both multi-system joint positioning and single system independent positioning capabilities. Multiple connectivity options are provided for easy integration into various applications.
Applications
- Mobile applications requiring precise geolocation capabilities
- Asset tracking and fleet management systems
- Navigation and positioning devices
- IoT applications with location awareness
- Geofencing and location-based services
Key Features
-
L76K GNSS Receiver
- Multi-constellation support: GPS, BeiDou, GLONASS, Galileo, QZSS
- Multi-system joint positioning and single system positioning modes
- AGNSS (Assisted GNSS) function for faster positioning
- High-performance positioning with excellent accuracy
- Low power consumption with standby mode support
- Fast Time-To-First-Fix (TTFF) performance
- Built-in jamming detection and mitigation
- Wide operating temperature range
-
Power Management
- Built-in 3.1V rechargeable button cell battery for RTC
- Power supply: 3.3V via connector
- Low-power standby mode with wake functionality
- Reset functionality for system recovery
-
Antenna Support
- Onboard U.FL antenna connector
- Support for passive and active antennas
- Optional active antenna power supply
-
Connectivity
- MFP (JST-SH1.0 6-Pin) Interface
- Power supply (3.3V)
- UART interface for data communication
- Wake and reset control pins
- 6-Pin 2.54mm Header Holes
- MFP (JST-SH1.0 6-Pin) Interface
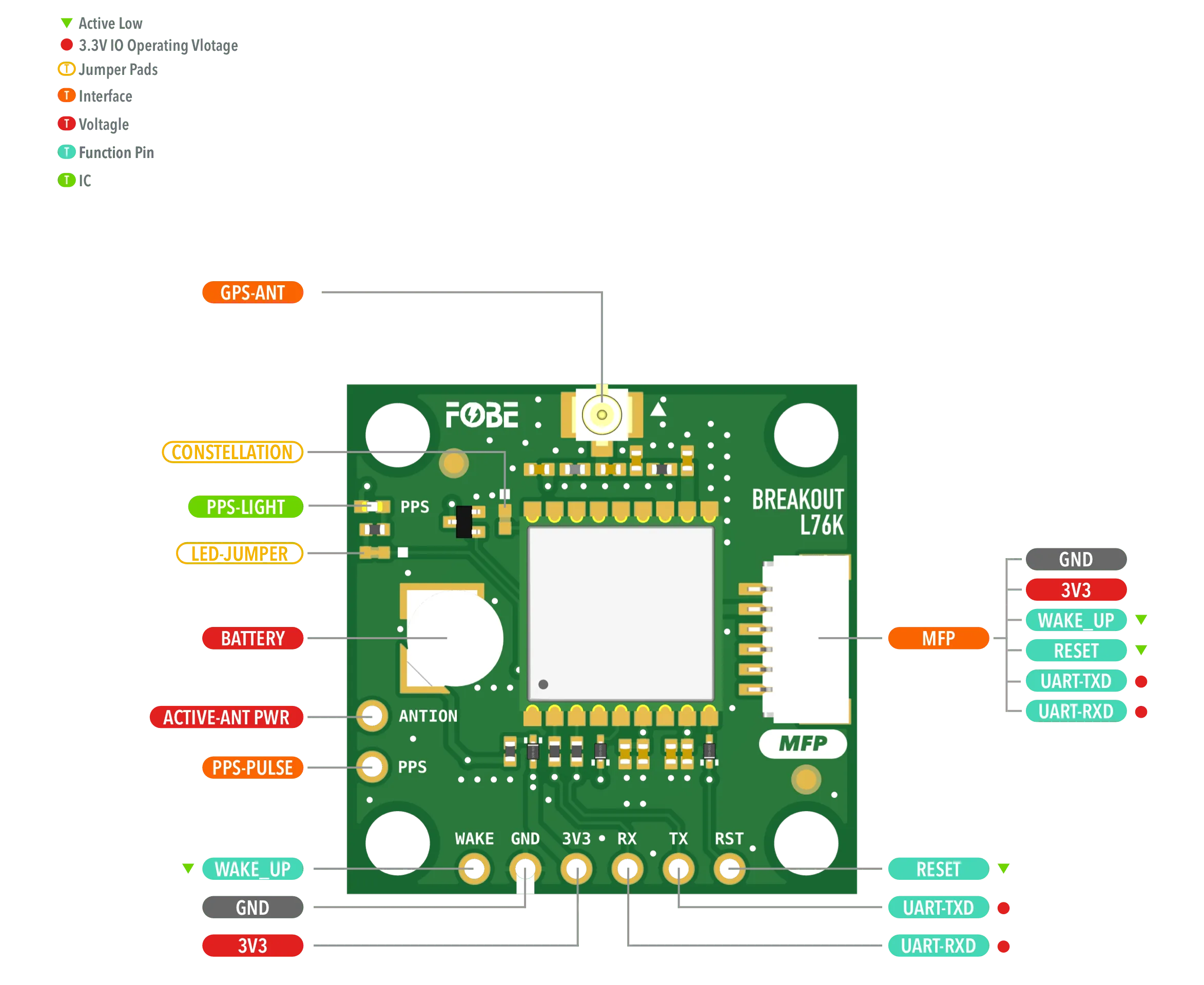
Hardware diagram
The following figure illustrates the FoBE Breakout L76K hardware diagram.
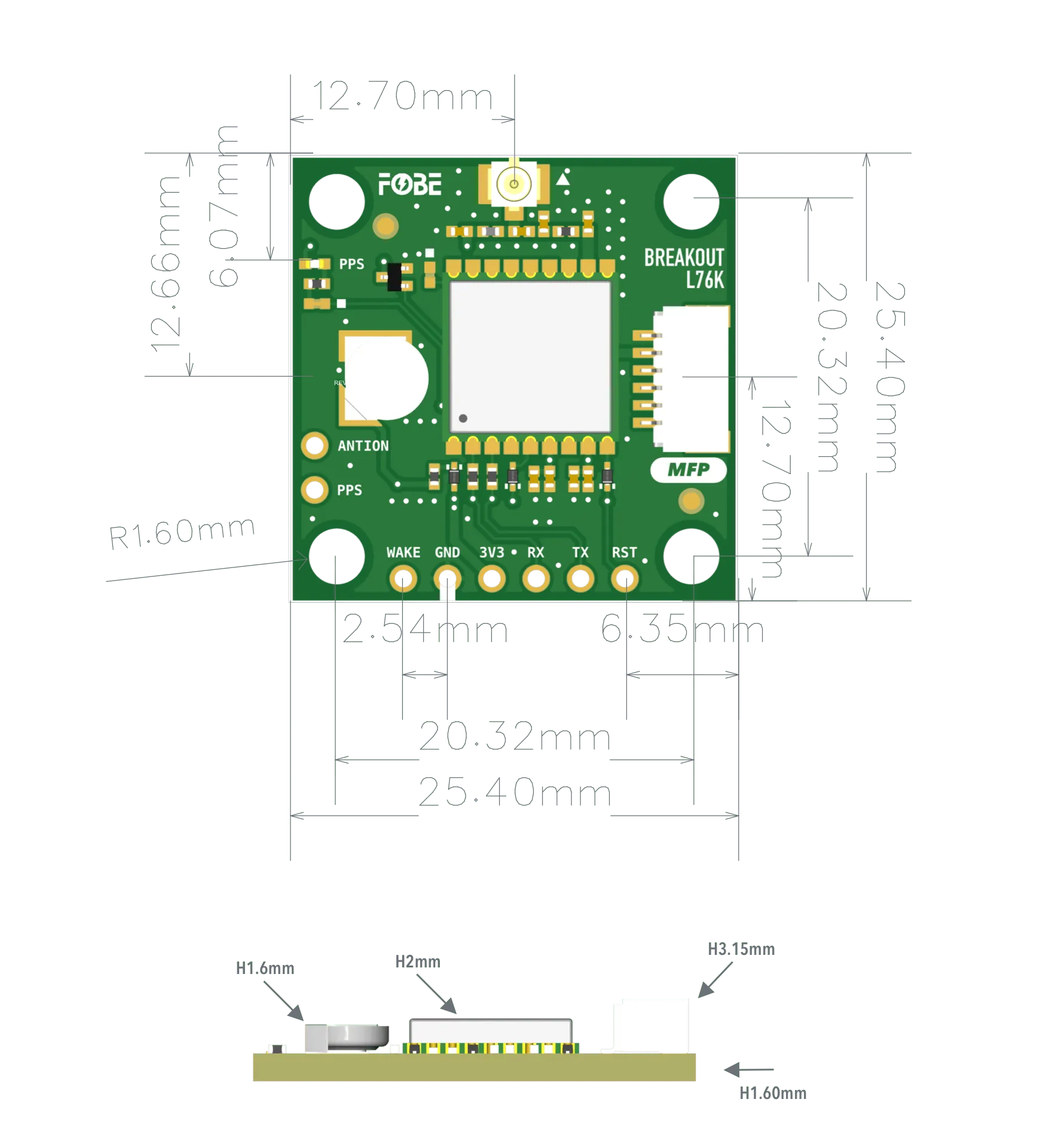
Mechanical dimensions
FoBE Breakout L76K is a single-sided 25.4mm x 25.4mm (1" x 1") 1.6mm thick PCB with a SH1.0 6-pin connector and a set of 6-pin 2.54mm header holes. Fixing by 4 x 1.6mm Screw holes.
Interfaces
The module provides a 6-Pin JST SH1.0 connector and corresponding 2.54mm header holes.
| 2.54mm 6-Pin | JST-SH1.0 | Features |
|---|---|---|
| 3V3 | 3V3 | Power supply, Only 3.3V |
| GND | GND | Ground |
| TX | TX | UART data output |
| RX | RX | UART command input |
| RST | RST | Reset IC, Active Low |
| WAKE | WAKE | Standby mode control, Active Low |
Advanced
Jumper
The module features two jumper pads:
| Interface | Description |
|---|---|
| CONSTELLATION | Satellite constellation selector:Soldered: GPS + GLONASSOpen: BeiDou + GPS (Default) |
| LED-JUMPER | Disconnect this jumper to turn off the PPS LED for further power saving |
Additional Features
- Built-in Battery: 3.1V rechargeable button cell for data retention
- Active Antenna Support: Connect "ACTIVE-ANT PWR" pad to 3V3 when using active antenna
- PPS Output: Pulse-per-second signal output, independent of LED jumper control
Programming
Running with FoBE Quill ESP32S3 Mesh
Let's get started with the FoBE Quill ESP32S3 Mesh using the MFP interface.
- Connect the FoBE Breakout L76K to the FoBE Quill ESP32S3 Mesh using the MFP interface.
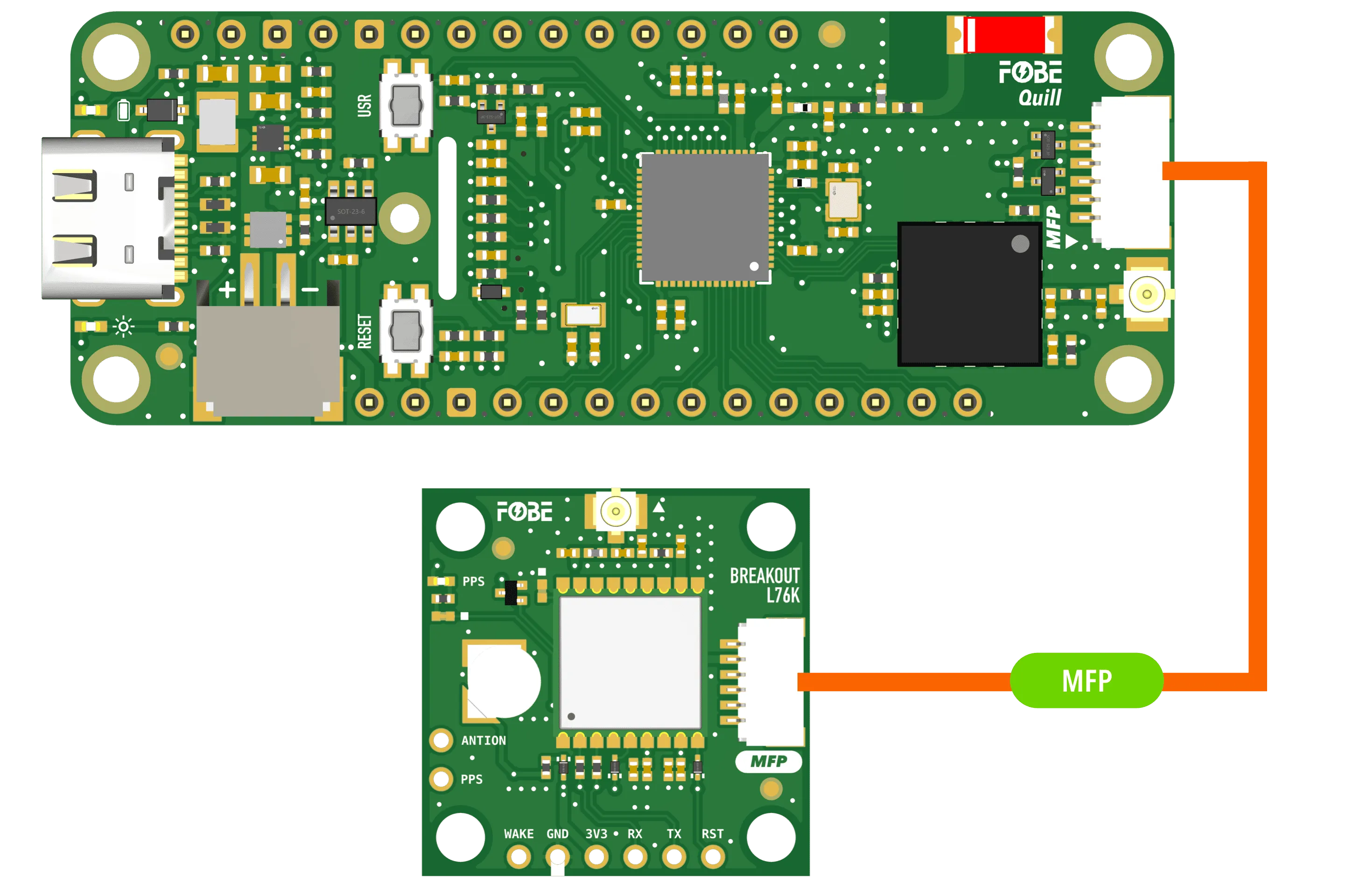
-
Create a sketch or PlatformIO project, or follow the FoBE Quill ESP32S3 Programming Guide for pre-configuration.
-
Install the necessary library in your project:
mikalhart/TinyGPSPlus@^1.1.0
- Copy the following code into your sketch or PlatformIO project:
#include <TinyGPSPlus.h>
#include <SoftwareSerial.h>
#define GNSS_BAUD 9600 // GNSS module baud rate
#define GNSS_RX_PIN PIN_MFP1 // RX pin for GNSS communication, change if needed
#define GNSS_TX_PIN PIN_MFP2 // TX pin for GNSS communication, change if needed
#define GNSS_RST_PIN PIN_MFP3 // Reset pin for GNSS, change if needed
#define GNSS_WAKE_PIN PIN_MFP4 // Wake pin for GNSS, change if needed
#define PERI_EN_PIN PIN_PERI_EN // Peripheral enable pin, change if needed
TinyGPSPlus gnss;
// Buffer to store the latest NMEA sentence
String latestNmeaSentence = "";
char nmeaBuffer[128];
int bufferIndex = 0;
// Time tracking variables
unsigned long startupTime = 0;
unsigned long firstFixTime = 0;
bool firstFixAchieved = false;
void setup()
{
// Initialize serial communication
Serial.begin(115200);
Serial.println("Serial initialized");
// Initialize peripheral power
if (PERI_EN_PIN >= 0)
{
pinMode(PERI_EN_PIN, OUTPUT);
digitalWrite(PERI_EN_PIN, HIGH); // Enable peripheral power
Serial.println("Peripheral power enabled");
}
// Initialize GNSS module (optional, if you want to test searching time cost)
pinMode(GNSS_RST_PIN, OUTPUT);
pinMode(GNSS_WAKE_PIN, OUTPUT);
digitalWrite(GNSS_RST_PIN, LOW); // Reset the GNSS module
delay(100);
digitalWrite(GNSS_RST_PIN, HIGH); // Release reset
digitalWrite(GNSS_WAKE_PIN, HIGH); // Wake the GNSS module
Serial1.begin(GNSS_BAUD, SERIAL_8N1, GNSS_RX_PIN, GNSS_TX_PIN);
Serial.println("GNSS bus initialized");
// Wait a moment for module to fully initialize
delay(200);
// Record startup time
startupTime = millis();
Serial.printf("Startup time recorded: %lu ms\n", startupTime);
// Wait for GNSS to be ready (equivalent to sensor init loop)
Serial.println("Waiting for GNSS data...");
unsigned long startTime = millis();
while (millis() - startTime < 10000) // Wait up to 10 seconds
{
while (Serial1.available() > 0)
{
gnss.encode(Serial1.read());
}
if (gnss.location.isValid() || gnss.time.isValid() || gnss.satellites.value() > 0)
{
break;
}
delay(200);
}
// Configure GNSS settings, calculate checksum reference https://www.hhhh.org/wiml/proj/nmeaxor.html
Serial1.write("$PCAS04,7*1E\r\n"); // Configure satellite constellation
delay(250);
Serial1.write("$PCAS11,3*1E\r\n"); // Configure positioning mode
delay(250);
Serial1.write("$PCAS03,1,0,0,0,1,0,0,0,0,0,,,0,0*02\r\n"); // Configure positioning frequency
delay(250);
Serial1.write("$PCAS02,200*1D\r\n"); // Configure positioning frequency
delay(250);
Serial.println("GNSS sensor initialized");
// Start measurement (GNSS automatically starts after initialization)
}
void loop()
{
delay(50); // Wait equivalent to gnss.wait()
// Read data from GNSS (equivalent to gnss.update())
bool dataUpdated = false;
while (Serial1.available() > 0)
{
char c = Serial1.read();
// Build NMEA sentence buffer
if (c == '$')
{
bufferIndex = 0;
nmeaBuffer[bufferIndex++] = c;
}
else if (bufferIndex > 0 && bufferIndex < 127)
{
nmeaBuffer[bufferIndex++] = c;
if (c == '\n')
{
nmeaBuffer[bufferIndex] = '\0';
latestNmeaSentence = String(nmeaBuffer);
}
}
if (gnss.encode(c))
{
dataUpdated = true;
}
}
if (dataUpdated) // Equivalent to gnss.update() == RESULT_OK
{
if (gnss.location.isValid() || gnss.time.isValid()) // Equivalent to gnss.hasNewData()
{
// Check for first fix achievement
if (!firstFixAchieved && gnss.location.isValid())
{
firstFixTime = millis();
firstFixAchieved = true;
}
// Display data on screen
Serial.print("\033[H\033[J");
Serial.println("> FoBE Breakout L76K Monitor");
Serial.println();
Serial.print("\033[7m");
Serial.printf("%-12s%-12s%-12s\n", "INDEX", "VALUE", "UNIT");
Serial.print("\033[0m");
if (gnss.location.isValid())
{
Serial.printf("%-12s%-12.6f%-12s\n", "LATITUDE", gnss.location.lat(), "°");
Serial.printf("%-12s%-12.6f%-12s\n", "LONGITUDE", gnss.location.lng(), "°");
}
if (gnss.altitude.isValid())
{
Serial.printf("%-12s%-12.2f%-12s\n", "ALTITUDE", gnss.altitude.meters(), "m");
}
if (gnss.speed.isValid())
{
Serial.printf("%-12s%-12.2f%-12s\n", "SPEED", gnss.speed.kmph(), "km/h");
}
if (gnss.satellites.isValid())
{
Serial.printf("%-12s%-12d%-12s\n", "SATELLITES", gnss.satellites.value(), "");
}
if (gnss.hdop.isValid())
{
Serial.printf("%-12s%-12.2f%-12s\n", "HDOP", gnss.hdop.hdop(), "");
}
// Add GPS time display
if (gnss.time.isValid() && gnss.date.isValid())
{
Serial.printf("%-12s%02d:%02d:%02d%-12s\n", "TIME", gnss.time.hour(), gnss.time.minute(), gnss.time.second(), "UTC");
Serial.printf("%-12s%04d-%02d-%02d%-12s\n", "DATE", gnss.date.year(), gnss.date.month(), gnss.date.day(), "");
}
// Add Time to First Fix Information
if (firstFixAchieved)
{
unsigned long timeToFirstFix = firstFixTime - startupTime;
Serial.printf("%-12s%-12.3f%-12s\n", "TTFF", timeToFirstFix / 1000.0, "SEC");
}
else
{
unsigned long currentTime = millis();
unsigned long timeElapsed = currentTime - startupTime;
Serial.printf("%-12s%-12.3f%-12s\n", "SEARCHING", timeElapsed / 1000.0, "SEC");
}
// Print latest NMEA data stream below the table
Serial.println();
Serial.println("Latest NMEA Data Stream:");
if (latestNmeaSentence.length() > 0)
{
Serial.print(latestNmeaSentence);
}
else
{
Serial.println("No NMEA data received yet");
}
}
}
}
This example code uses ANSI output formatting. Your terminal must support ANSI escape codes to display the output correctly.
# platformio.ini
[env:fobe_quill_esp32s3_mesh]
platform = FoBE Espressif 32
board = fobe_quill_esp32s3_mesh
framework = arduino
lib_deps =
mikalhart/TinyGPSPlus@^1.1.0
monitor_speed = 115200
monitor_raw = true
- Build and upload the project. You should see the FoBE Breakout L76K Monitor output in the serial monitor (raw mode).
> FoBE Breakout L76K Monitor
INDEX VALUE UNIT
LATITUDE 22.123456 °
LONGITUDE 114.123456 °
ALTITUDE 71.20 m
SPEED 17.33 km/h
SATELLITES 15
HDOP 24.80
TIME 19:59:03UTC
DATE 2025-08-08
TTFF 3.236 SEC
Latest NMEA Data Stream:
$GNGSA,A,1,,,,,,,,,,,,,25.5,24.8,25.5,1*0D
Resources
[PDF] FoBE Breakout L76K Datasheet
[PDF] FoBE Breakout L76K Schematic