Getting Started with FoBE Breakout AS5600
Introduction
The FoBE Breakout AS5600 integrates the AMS-AS5600 programmable 12-bit high-resolution contactless magnetic rotary position sensor. The sensor can function as a magnetic potentiometer or magnetic encoder with excellent reliability and durability, providing contactless angle measurement without rotation angle limitations. Multiple connectivity options are provided for easy integration into various applications.
Applications
- Motor closed-loop control systems
- Robot arms and automation equipment
- Tripod heads and camera mounts
- Industrial machine control and positioning
Key Features
-
AS5600
- Contactless angle measurement for highest reliability and durability
- 12-bit DAC output resolution for high precision
- Programmable angular range from 18° up to 360°
- Simple user-programmable start and stop positions via I²C interface
- Selectable output: analog ratiometric to VDD or PWM-encoded digital
- Automatic magnet detection for easy setup
- Low-power consumption with automatic low-power mode entry
- Wide temperature range: -40°C to +125°C
- Robust environmental tolerance
- Non-contact operation with no rotation angle limitation
-
Connectivity
- MFP-IIC interface (JST-SH1.0 4-Pin)
- 5 x 2.54mm Pin Header
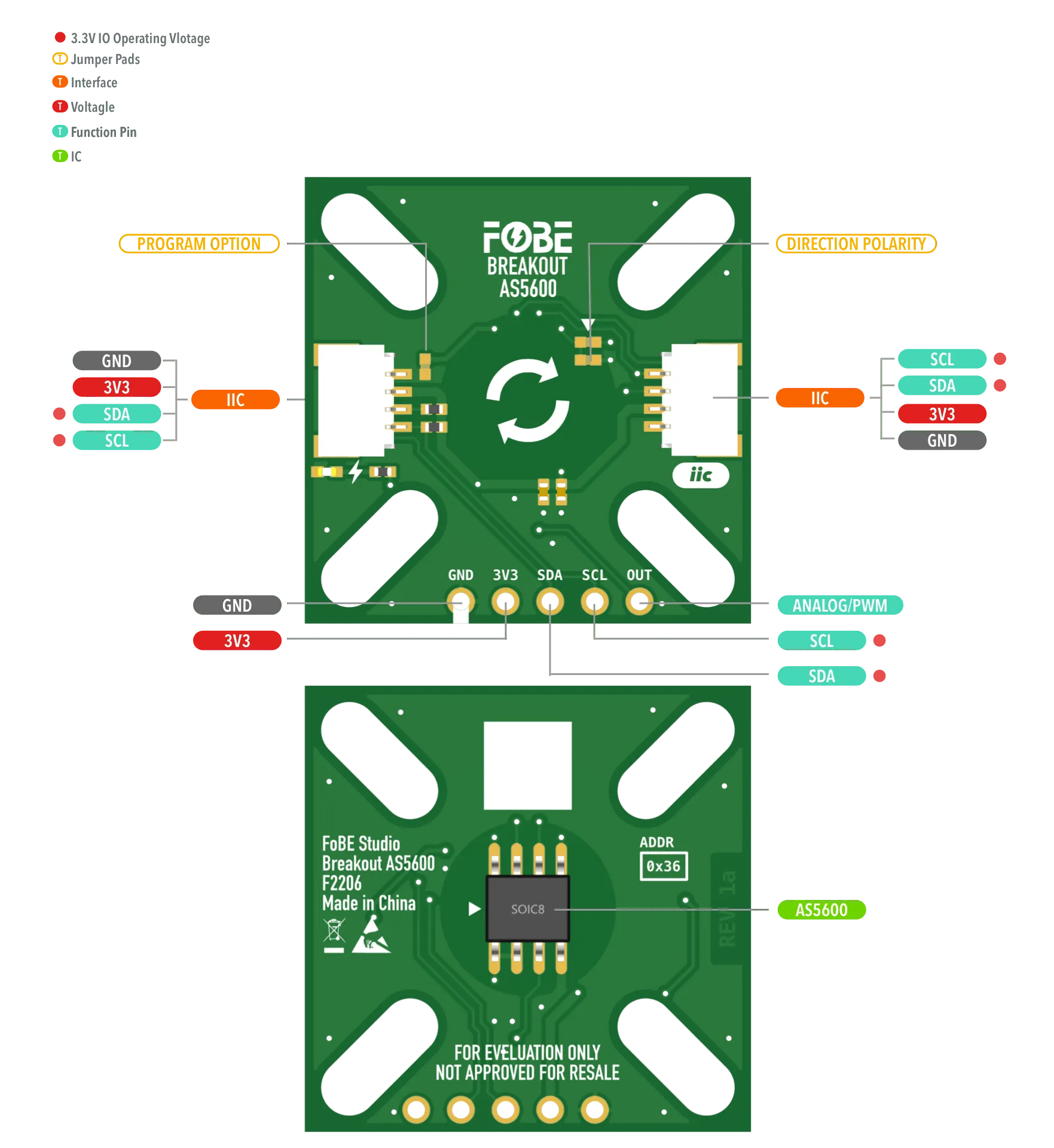
Hardware diagram
The following figure illustrates the FoBE Breakout AS5600 hardware diagram.
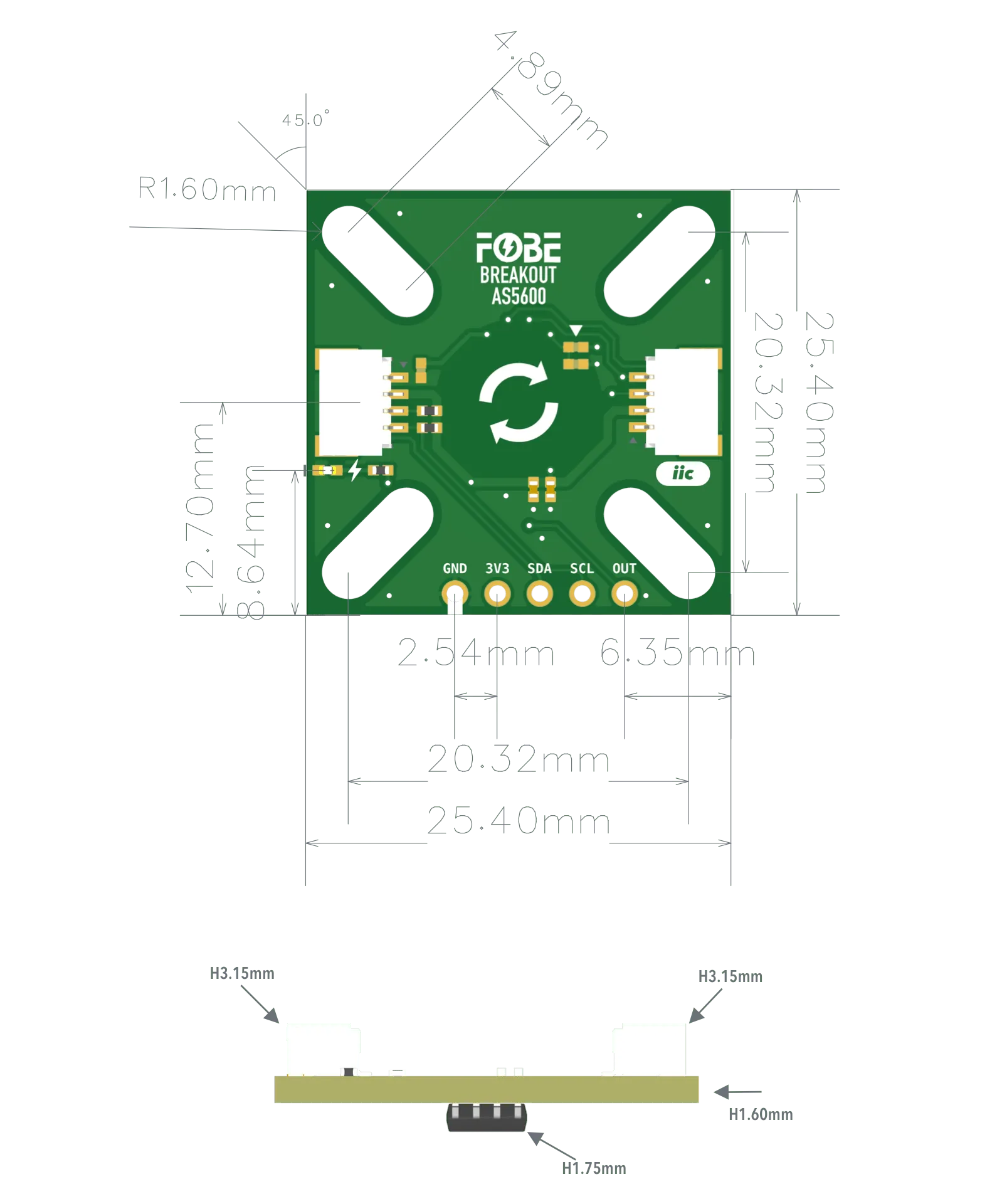
Mechanical dimensions
FoBE Breakout AS5600 is a single-sided 25.4mm x 25.4mm (1" x 1") 1.6mm thick PCB with two SH1.0 4-pin connectors and a set of 5-pin 2.54mm header holes. Fixing by 4 x 1.6mm Screw holes.
Interfaces
The module provides dual 5-Pin JST SH1.0 connectors, compatible with STEMMA QT / Qwiic.
| 2.54mm 5-Pin | JST-SH1.0 | Features |
|---|---|---|
| GND | GND | Ground |
| 3V3 | 3V3 | Power supply, Only 3.3V |
| SCL | SCL | I2C-Clock line |
| OUT | — | Analog/PWM output |
title: Quick Start with FoBE Breakout AS5600 description: Quick Start with FoBE Breakout AS5600. sidebar_label: Quick Start image: /img/products/f2206-r1a.main.webp toc_max_heading_level: 4 sidebar_position: 1 tags:
- FoBE
- Breakout
- Sensor last_update: date: 10/30/2025 author: Fernando
Advanced
Jumper
The module features two jumper pads:
| Interface | Description |
|---|---|
| PROGRAM OPTION | Angle programming mode selector:Connected: Programming via OUT pinDisconnected: Programming via I²C interface (Default) |
| DIRECTION POLARITY | Direction polarity selector:Lower position: Values increase clockwiseUpper position: Values increase counterclockwise |
Programming
Running with FoBE Quill ESP32S3 Mesh
Let's get started with the FoBE Quill ESP32S3 Mesh using the MFP interface.
- Connect the FoBE Breakout AS5600 to the FoBE Quill ESP32S3 Mesh using the MFP interface.
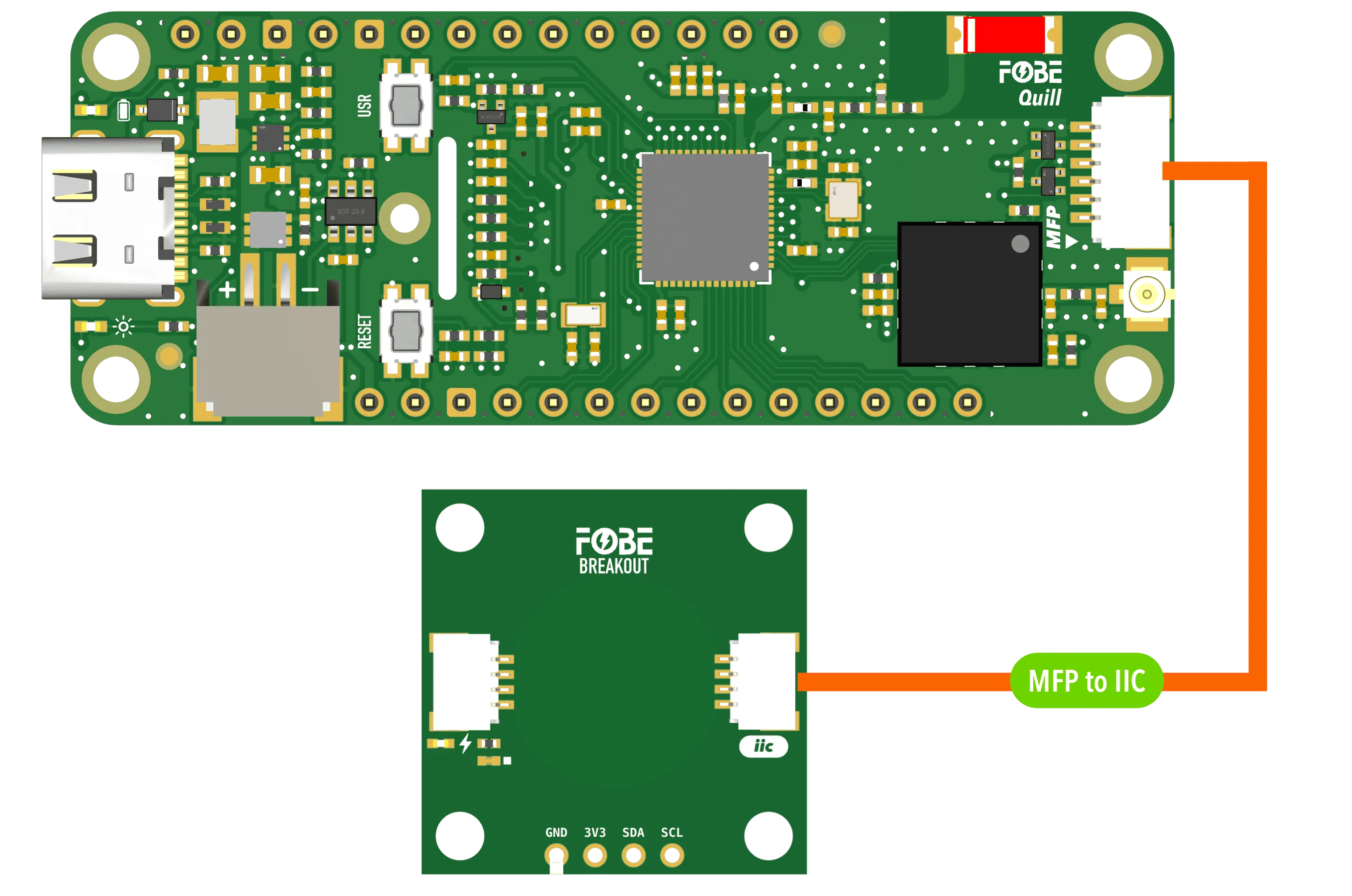
-
Create a sketch or PlatformIO project, or follow the FoBE Quill ESP32S3 Programming Guide for pre-configuration.
-
Install the necessary library in your project:
robtillaart/AS5600@^0.6.6
- Copy the following code into your sketch or PlatformIO project:
#include <Arduino.h>
#include "AS5600.h"
#define I2C_ADDRESS 0x36 // I2C address definition for AS5600L
#define I2C_SDA_PIN PIN_MFP3 // SDA pin for MFP to I2C cable, change if needed
#define I2C_SCL_PIN PIN_MFP4 // SCL pin for MFP to I2C cable, change if needed
#define PERI_EN_PIN PIN_PERI_EN // Peripheral enable pin, change if needed
AS5600L sensor;
// Variables for speed calculation
float lastAngle = 0.0;
unsigned long lastTime = 0;
float angularVelocity = 0.0;
void setup()
{
// Initialize serial communication
Serial.begin(115200);
Serial.println("Serial initialized");
// Initialize peripheral power
if (PERI_EN_PIN >= 0)
{
pinMode(PERI_EN_PIN, OUTPUT);
digitalWrite(PERI_EN_PIN, HIGH); // Enable peripheral power
Serial.println("Peripheral power enabled");
}
// Initialize sensor
Wire.begin(I2C_SDA_PIN, I2C_SCL_PIN);
sensor.begin(4);
Serial.println("I2C bus initialized");
// Configure sensor first
sensor.setDirection(AS5600_CLOCK_WISE);
sensor.setAddress(I2C_ADDRESS);
while (!sensor.isConnected())
{
delay(200);
}
Serial.println("AS5600L sensor initialized");
// Initialize timing for speed calculation
lastTime = millis();
}
void loop()
{
delay(50); // Wait equivalent to sensor.wait()
// Equivalent to sensor.update() == RESULT_OK
if (sensor.isConnected())
{
unsigned long currentTime = millis();
uint16_t angle = sensor.readAngle();
float degrees = sensor.rawAngle() * AS5600_RAW_TO_DEGREES;
// Calculate angular velocity (degrees per second)
float deltaTime = (currentTime - lastTime) / 1000.0; // Convert to seconds
float deltaAngle = degrees - lastAngle;
// Handle angle wraparound (0-360 degrees)
if (deltaAngle > 180.0) {
deltaAngle -= 360.0;
} else if (deltaAngle < -180.0) {
deltaAngle += 360.0;
}
if (deltaTime > 0) {
angularVelocity = deltaAngle / deltaTime;
}
// Update last values
lastAngle = degrees;
lastTime = currentTime;
// Get additional sensor parameters
uint16_t magnitude = sensor.readMagnitude();
uint8_t status = sensor.readStatus();
uint8_t agc = sensor.readAGC();
// Always display data (remove the condition check that was blocking output)
// Display data on screen
Serial.print("\033[H\033[J");
Serial.println("> FoBE Breakout AS5600 Monitor");
Serial.println();
Serial.print("\033[7m");
Serial.printf("%-12s%-12s%-12s\n", "INDEX", "VALUE", "UNIT");
Serial.print("\033[0m");
Serial.printf("%-12s%-12d%-12s\n", "ANGLE", angle, "RAW");
Serial.printf("%-12s%-12.2f%-12s\n", "DEGREES", degrees, "°");
Serial.printf("%-12s%-12.2f%-12s\n", "VELOCITY", angularVelocity, "°/s");
Serial.printf("%-12s%-12d%-12s\n", "MAGNITUDE", magnitude, "");
Serial.printf("%-12s%-12d%-12s\n", "STATUS", status, "");
Serial.printf("%-12s%-12d%-12s\n", "AGC", agc, "");
}
}
This example code uses ANSI output formatting. Your terminal must support ANSI escape codes to display the output correctly.
# platformio.ini
[env:fobe_quill_esp32s3_mesh]
platform = FoBE Espressif 32
board = fobe_quill_esp32s3_mesh
framework = arduino
lib_deps =
robtillaart/AS5600@^0.6.6
monitor_speed = 115200
monitor_raw = true
- Build and upload the project. You should see the FoBE Breakout AS5600 Monitor output in the serial monitor (raw mode).
> FoBE Breakout AS5600 Monitor
INDEX VALUE UNIT
ANGLE 2665 RAW
DEGREES 234.23 °
VELOCITY 0.00 °/s
MAGNITUDE 1122
## Resources
**[PDF]** [FoBE Breakout AS5600 Datasheet](/assets/files/f2206/f2206.prj.datasheet.r1a.pdf)
**[PDF]** [FoBE Breakout AS5600 Schematic](/assets/files/f2206/f2206.prj.sch.r1a.pdf)
**[PDF]** [FoBE Breakout AS5600 Dimension](/assets/files/f2206/f2206.prj.dim.r1a.pdf)
**[OBJ]** [FoBE Breakout AS5600 3D Model](/assets/files/f2206/f2206.prj.model.r1a.obj)